Chapter 10 Dynamic Compilation
14.1 Introduction
The term dynamic compilation refers to techniques for runtime generation of executable code. The idea of compiling parts or all the application code while the program is executing challenges our intuition about overheads involved in such an endeavor, yet recently a number of approaches have evolved that effectively manage this challenging task.
The ability to dynamically adapt executing code addresses many of the existing problems with traditional static compilation approaches. One such problem is the difficulty for a static compiler to fully exploit the performance potential of advanced architectures. In the drive for greater performance, today's microprocessors provide capabilities for the compiler to take on a greater role in performance delivery, ranging from predicated and speculative execution (e.g., for the Intel Itanium processor) to various power consumption control models. To exploit these architectural features, the static compiler usually has to rely on profile information about the dynamic execution behavior of a program. However, collecting valid execution profiles ahead of time may not always be feasible or practical. Moreover, the risk of performance degradation that may result from missing or outdated profile information is high.
Current trends in software technology create additional obstacles to static compilation. These are exemplified by the widespread use of object-oriented programming languages and the trend toward shipping software binaries as collections of dynamically linked libraries instead of monolithic binaries. Unfortunately, the increased degree of runtime binding can seriously limit the effectiveness of traditional static compiler optimization, because static compilers operate on the statically bound scope of the program.
Finally, the emerging Internet and mobile communications marketplace creates the need for the compiler to produce portable code that can efficiently execute on a variety of machines. In an environment of networked devices, where code can be downloaded and executed on the fly, static compilation at the target device is usually not an option. However, if static compilers can only be used to generate platform-independent intermediate code, their role as a performance delivery vehicle becomes questionable.
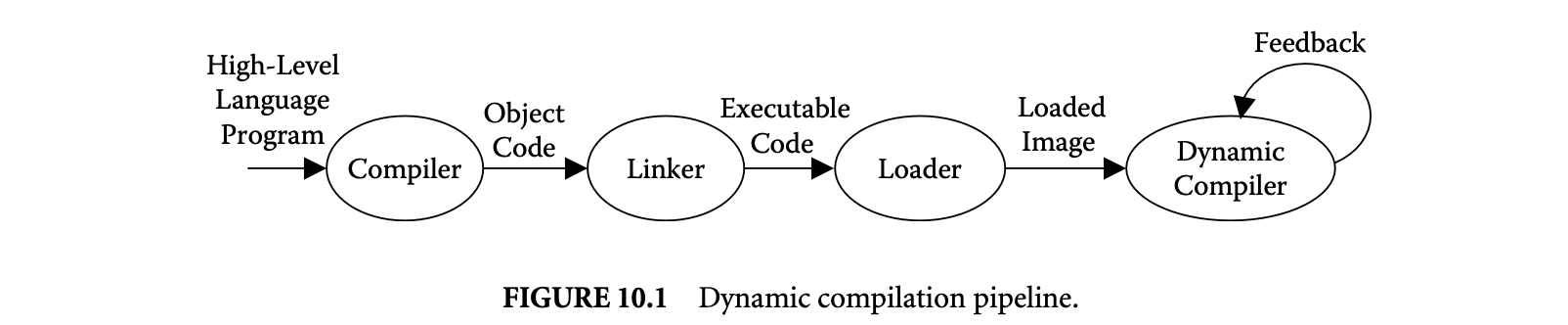
This chapter discusses dynamic compilation, a radically different approach to compilation that addresses and overcomes many of the preceding challenges to effective software implementation. Dynamic compilation extends our traditional notion of compilation and code generation by adding a new dynamic stage to the classical pipeline of compiling, linking, and loading code. The extended dynamic compilation pipeline is depicted in Figure 10.1.
A dynamic compiler can take advantage of runtime information to exploit optimization opportunities not available to a static compiler. For example, it can customize the running program according to information about actual program values or actual control flow. Optimization may be performed across dynamic binding, such as optimization across dynamically linked libraries. Dynamic compilation avoids the limitations of profile-based approaches by directly utilizing runtime information. Furthermore, with a dynamic compiler, the same code region can be optimized multiple times should its execution environment change. Another unique opportunity of dynamic compilation is the potential to speed up the execution of legacy code that was produced using outdated compilation and optimization technology.
Dynamic compilation provides an important vehicle to efficiently implement the "write-once-run-anywhere" execution paradigm that has recently gained a lot of popularity with the Java programming language [22]. In this paradigm, the code image is encoded in a mobile platform-independent format (e.g., Java bytecode). Final code generation that produces native code takes place at runtime as part of the dynamic compilation stage.
In addition to addressing static compilation obstacles, the presence of a dynamic compilation stage can create entirely new opportunities that go beyond code compilation. Dynamic compilation can be used to transparently migrate software from one architecture to a different host architecture. Such a translation is achieved by dynamically retargeting the loaded nonnative guest image to the host machine native format. Even for machines within the same architectural family, a dynamic compiler may be used to upgrade software to exploit additional features of the newer generation.
As indicated in Figure 10.1, the dynamic compilation stage may also include a feedback loop. With such a feedback loop, dynamic information, including the dynamically compiled code itself, may be saved at runtime to be restored and utilized in future runs of the program. For example, the FXl32 system for emulating x86 code on an Alpha platform [27] saves runtime information about executed code, which is then used to produce translations offline that can be incorporated in future runs of the program. It should be noted that FXl32 is not strictly a dynamic compilation system, in that translations are produced between executions of the program instead of online during execution.
Along with its numerous opportunities, dynamic compilation also introduces a unique set of challenges. One such challenge is to amortize the dynamic compilation overhead. If dynamic compilation is sequentially interleaved with program execution, the dynamic compilation time directly contributes to the overall execution time of the program. Such interleaving greatly changes the cost-benefit compilation trade-off that we have grown accustomed to in static compilation. Although in a static compiler increased optimization effort usually results in higher performance, increasing the dynamic compilation time may actually diminish some or all of the performance improvements that were gained by the optimization in the first place. If dynamic compilation takes place in parallel with program execution on a multiprocessor system, the dynamic compilation overhead is less important, because the dynamic compiler cannot directly slow down the program. It does, however, divert resources that could have been devoted to execution. Moreover, long dynamic compilation times can still adversely affect performance. Spending too much time on compilation can delay the employment of the dynamically compiled code and diminish the benefits. To maximize the benefits, dynamic compilation time should therefore always be kept to a minimum.
To address the heightened pressure for minimizing overhead, dynamic compilers often follow an adaptive approach [23]. Initially, the code is optimized with little or no optimization. Aggressive optimizations are considered only later, when more evidence has been found that added optimization effort is likely to be of use.
A dynamic compilation stage, if not designed carefully, can also significantly increase the space requirement for running a program. Controlling additional space requirements is crucial in environments where code size is important, such as embedded or mobile systems. The total space requirements of execution with a dynamic compiler include not only the loaded input image but also the dynamic compiler itself, plus the dynamically compiled code. Thus, care must be taken to control both the footprint of the dynamic compiler and the size of the currently maintained dynamically compiled code.
10.2 Approaches to Dynamic Compilation
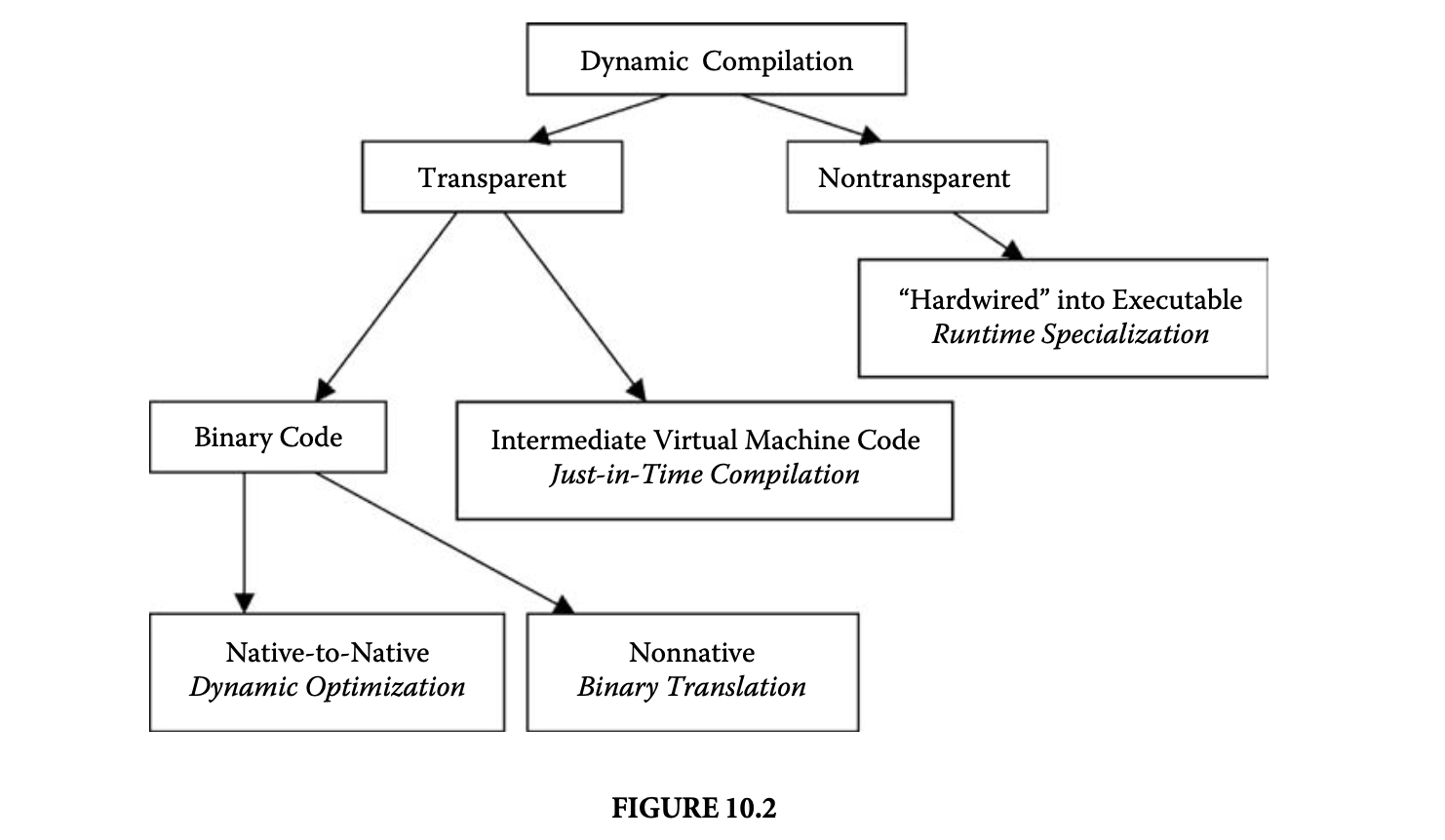
A number of approaches to dynamic compilation have been developed. These approaches differ in several aspects, including the degree of transparency, the extent and scope of dynamic compilation, and the assumed encoding format of the loaded image. On the highest level, dynamic compilation systems can be divided into transparent and nontransparent systems. In a transparent system, the remainder of the compilation pipeline is oblivious to the fact that a dynamic compilation stage has been added. The executable produced by the linker and loader is not specially prepared for dynamic optimization, and it may execute with or without a dynamic compilation stage. Figure 10.2 shows a classification of the various approaches to transparent and nontransparent dynamic compilation.
Transparent dynamic compilation systems can further be divided into systems that operate on binary executable code (binary dynamic compilation) and systems that operate on an intermediate platform-independent encoding (just-in-time [JIT] compilation). A binary dynamic compiler starts out with a loaded fully executable binary. In one scenario, the binary dynamic compiler recompiles the binary code to incorporate native-to-native optimizing transformations. These recompilation systems are also referred to as dynamic optimizers[3, 5, 7, 15, 36]. During recompilation, the binary is optimized by customizing the code with respect to specific runtime control and data flow values. In dynamic binary translation, the loaded input binary is in a nonnative format, and dynamic compilation is used to retarget the code to a different host architecture [19, 35, 39]. The dynamic code translation may also include optimization.
JIT compilers present a different class of transparent dynamic compilers [11, 12, 18, 28, 29]. The input to a JIT compiler is not a native program binary; instead, it is code in an intermediate, platform-independent representation that targets a virtual machine. The JIT compiler serves as an enhancement to the virtual machine to produce native code by compiling the intermediate input program at runtime, instead of executing it in an interpreter. Typically, semantic information is attached to the code, such as symbol tables or constant pools, which facilitates the compilation.
Thealternative to transparent dynamic compilation is the nontransparent approach, which integrates the dynamic compilation stage explicitly within the earlier compilation stages. The static compiler cooperates with the dynamic compiler by delaying certain parts of the compilation to runtime, if their compilation can benefit from runtime values. A dynamic compilation agent is compiled (i.e., hardwired) into the executable to fill and link in a prepared code template for the delayed compilation region. Typically, the programmer indicates adequate candidate regions for dynamic compilation via annotations or compiler directives. Several techniques have been developed to perform runtime specialization of a program in this manner [9, 23, 31, 33].
Runtime specialization techniques are tightly integrated with the static compiler, whereas transparent dynamic compilation techniques are generally independent of the static compiler. However, transparent dynamic compilation can still benefit from information that the static compiler passes down. Semantic information, such as a symbol table, is an example of compiler information that is beneficial for dynamic compilation. If the static compiler is made aware of the dynamic compilation stage, more targeted information may be communicated to the dynamic compiler in the form of code annotations to the binary [30].
The remainder of this chapter discusses the various dynamic compilation approaches shown in Figure 10.2. We first discuss transparent binary dynamic optimization as a representative dynamic compilation system. We discuss the mechanics of dynamic optimization systems and their major components, along with their specific opportunities and challenges. We then discuss systems in each of the remaining dynamic compilation classes and point out their unique characteristics.
Also, a number of hardware approaches are available to dynamically manipulate the code of a running program, such as the hardware in out-of-order superscalar processors or hardware dynamic optimization in trace cache processors [21]. However, in this chapter, we limit the discussion to software dynamic compilation.
10.3 Transparent Binary Dynamic Optimization
A number of binary dynamic compilation systems have been developed that operate as an optional dynamic stage [3, 5, 7, 15, 35]. An important characteristic of these systems is that they take full control of the execution of the program. Recall that in the transparent approach, the input program is not specially prepared for dynamic compilation. Therefore, if the dynamic compiler does not maintain full control over the execution, the program may escape and simply continue executing natively, effectively bypassing dynamic compilation altogether. The dynamic compiler can afford to relinquish control only if it can guarantee that it will regain control later, for example, via a timer interrupt.
Binary dynamic compilation systems share the general architecture shown in Figure 10.3. Input to the dynamic compiler is the loaded application image as produced by the compiler and linker. Two main components of a dynamic compiler are the compiled code cache that holds the dynamically compiled code fragments and the dynamic compilation engine. At any point in time, execution takes place either in the dynamic compilation engine or in the compiled code cache. Correspondingly, the dynamic compilation engine maintains two distinct execution contexts: the context of the dynamic compilation engine itself and the context of the application code.
Execution of the loaded image starts under control of the dynamic compilation engine. The dynamic compiler determines the address of the next instruction to execute. It then consults a lookup table to determine whether a dynamically compiled code fragment starting at that address already exists in the code cache. If so, a context switch is performed to load the application context and to continue execution in the compiled code cache until a code cache miss occurs. A code cache miss indicates that no compiled fragment exists for the next instruction. The cache miss triggers a context switch to reload the dynamic compiler's context and reenter the dynamic compilation engine.
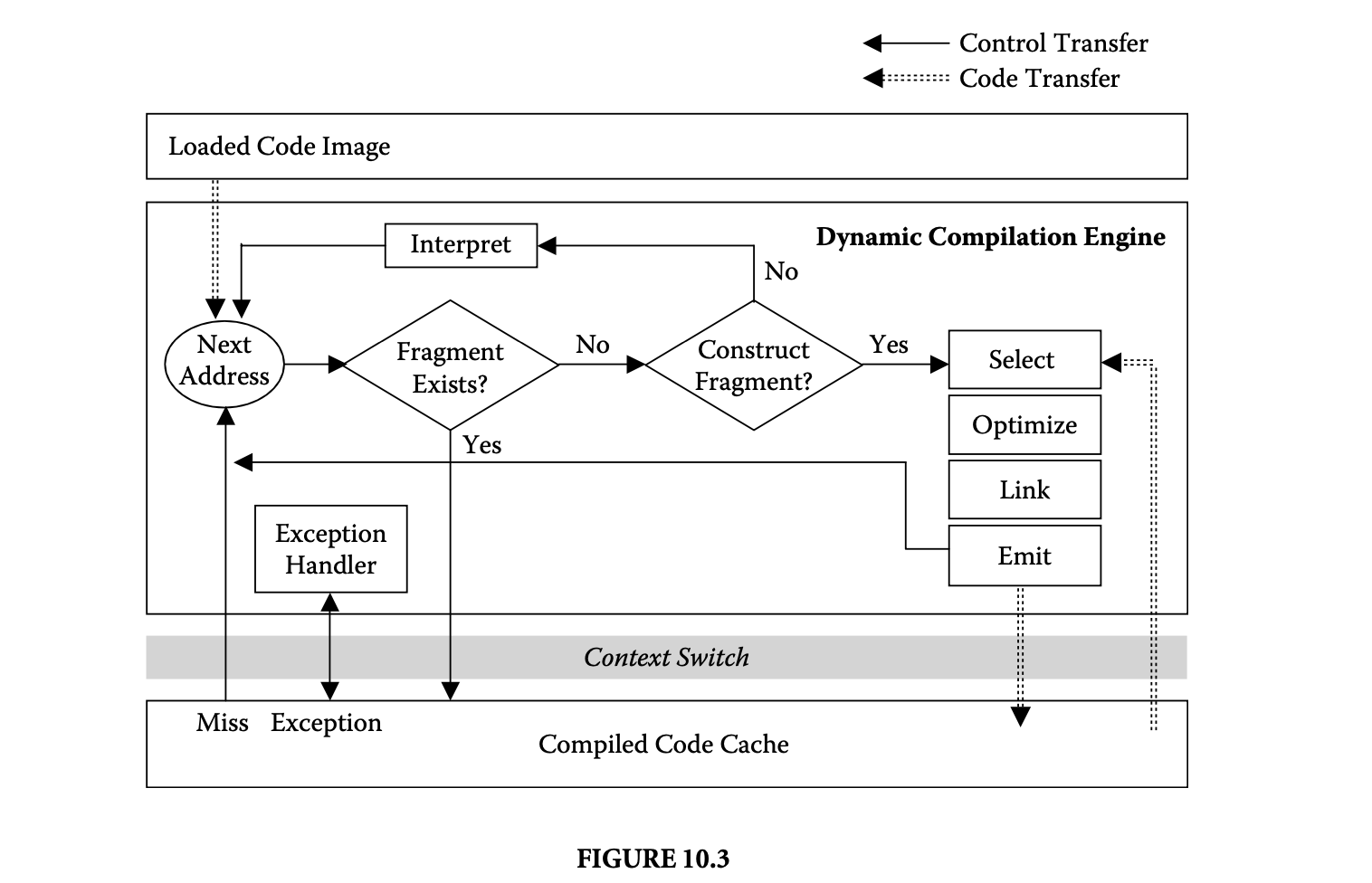 The dynamic compiler decides whether a new fragment should be compiled starting at the next address. If so, a code fragment is constructed based on certain fragment selection policies, which are discussed in the next section. The fragment may optionally be optimized and linked with other previously compiled fragments before it is emitted into the compiled code cache.
The dynamic compiler decides whether a new fragment should be compiled starting at the next address. If so, a code fragment is constructed based on certain fragment selection policies, which are discussed in the next section. The fragment may optionally be optimized and linked with other previously compiled fragments before it is emitted into the compiled code cache.
The dynamic compilation engine may include an instruction interpreter component. With an interpreter component, the dynamic compiler can choose to delay the compilation of a fragment and instead interpret the code until it has executed a number of times. During interpretation, the dynamic compiler can profile the code to focus its compilation efforts on only the most profitable code fragments [4]. Without an interpreter, every portion of the program that is executed during the current run can be compiled into the compiled code cache.
Figure 10.3 shows a code transfer arrow from the compiled code cache to the fragment selection component. This arrow indicates that the dynamic compiler may choose to select new code fragments from previously created code in the compiled code cache. Such fragment reformation may be performed to improve fragment shape and extent. For example, several existing code fragments may be combined to form a single new fragment. The dynamic compiler may also reselect an existing fragment for more aggressive optimization. Reoptimization of a fragment may be indicated if profiling of the compiled code reveals that it is a hot (i.e., frequently executing) fragment.
In the following sections, we discuss the major components of the dynamic compiler in detail: fragment selection, fragment optimization, fragment linking, management of the compiled code cache, and exception handling.
10.3.1 Fragment Selection
The fragment selector proceeds by extracting code regions and passing them to the fragment optimizer for optimization and eventual placement in the compiled code cache. The arrangement of the extracted code regions in the compiled code cache leads to a new code layout, which has the potential of improving the performance of dynamically compiled code. Furthermore, by passing isolated code regions to the optimizer, the fragment selector dictates the scope and kind of runtime optimization that may be performed. Thus, the goal of fragment selection is twofold: to produce an improved code layout and to expose dynamic optimization opportunities.
 New optimization opportunities or improvements in code layout are unlikely if the fragment selector merely copies static regions from the loaded image into the code cache. Regions such as basic blocks or entire procedures are among the static regions of the original program and have been already exposed to, and possibly optimized by, the static compiler. New optimization opportunities are more likely to be found in the dynamic scope of the executing program. Thus, it is crucial to incorporate dynamic control flow into the selected code regions.
New optimization opportunities or improvements in code layout are unlikely if the fragment selector merely copies static regions from the loaded image into the code cache. Regions such as basic blocks or entire procedures are among the static regions of the original program and have been already exposed to, and possibly optimized by, the static compiler. New optimization opportunities are more likely to be found in the dynamic scope of the executing program. Thus, it is crucial to incorporate dynamic control flow into the selected code regions.
Because of the availability of dynamic information, the fragment selector has an advantage over a static compiler in selecting the most beneficial regions to optimize. At the same time, the fragment selector is more limited because high-level semantic information about code constructs is no longer available. For example, without information about procedure boundaries and the layout of switch statements, it is generally impossible to discover the complete control flow of a procedure body in a loaded binary image.
In the presence of these limitations, the units of code commonly used in a binary dynamic compilation system are a partial execution trace, or trace for short BD [4, 7]. A trace is a dynamic sequence of consecutively executing basic blocks. The sequence may not be contiguous in memory; it may even be interprocedural, spanning several procedure boundaries, including dynamically linked modules. Thus, traces are likely to offer opportunities for improved code layout and optimization. Furthermore, traces do not need to be computed; they can be inferred simply by observing the runtime behavior of the program.
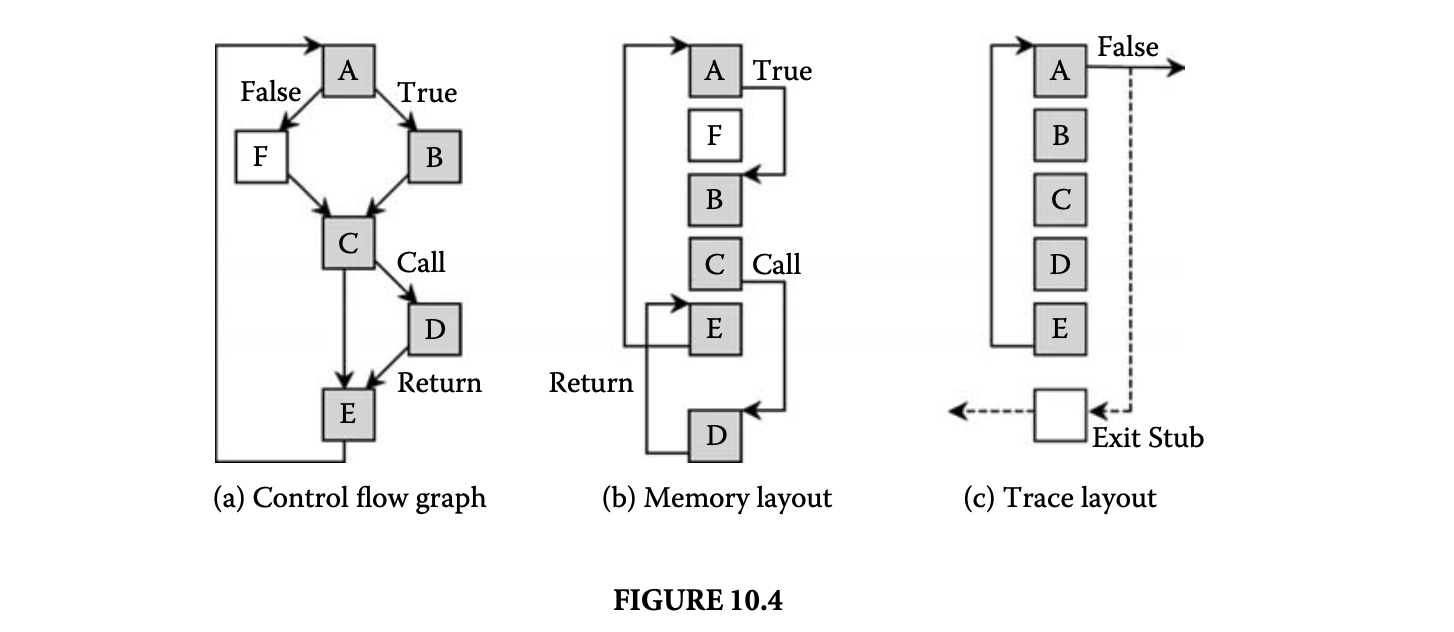
Figure 10.4 illustrates the effects of selecting dynamic execution traces. The graph in Figure 10.4a shows a control flow graph representation of a trace, consisting of blocks A, B, C, D, and E that form a loop containing a procedure call. The graph in Figure 10.4b shows the same trace in a possible noncontiguous memory layout of the original loaded program image. The graph in Figure 10.4c shows a possible improved layout of the looping trace in the compiled code cache as a contiguous straight-line sequence of blocks. The straight-line layout reduces branching during execution and offers better code locality for the loop.
10.3.1.1 Adaptive Fragment Selection
The dynamic compiler may select fragments of varying shapes. It may also stage the fragment selection in a progressive fashion. For example, the fragment selector may initially select only basic block fragments. Larger composite fragments, such as traces, are selected as secondary fragments by stringing together frequently executing block fragments [4]. Progressively larger regions, such as tree regions, may then be constructed by combining individual traces [19]. Building composite code regions can result in potentially large amounts of code duplication because code that is common across several composite regionsis replicated in each region. Uncontrolled code duplication can quickly result in excessive cache size requirements, the so-called code explosion problem. Thus, a dynamic compiler has to employ some form of execution profiling to limit composite region construction to only the (potentially) most profitable candidates.
10.3.1.2 Online Profiling
Profiling the execution behavior of the loaded code image to identify the most frequently executing regions is an integral part of dynamic compilation. Information about the hot spots in the code is used in fragment selection and for managing the compiled code cache space. Hot spots must be detected online as they are becoming hot, which is in contrast to conventional profiling techniques that operate offline and do not establish relative execution frequencies until after execution. Furthermore, to be of use in a dynamic compiler, the profiling techniques must have very low space and time overheads.
A number of offline profiling techniques have been developed for use in feedback systems, such as profile-based optimization. A separate profile run of the program is conducted to accumulate profile information that is then fed back to the compiler. Two major approaches to offline profiling are statistical PC sampling and binary instrumentation for the purpose of branch or path profiling. Statistical PC sampling [1, 10, 40] is an inexpensive technique for identifying hot code blocks by recording program counter hits. Although PC sampling is efficient for detecting individual hot blocks, it provides little help in finding larger hot code regions. One could construct a hot trace by stringing together the hottest code blocks. However, such a trace may never execute from start to finish because the individual blocks may have been hot along disjoint execution paths. The problem is that individually collected branch frequencies do not account for branch correlations, which occur if the outcome of one branch can influence the outcome of a subsequent branch.
Another problem with statistical PC sampling is that it introduces nondeterminism into the dynamic compilation process. Nondeterministic behavior is undesirable because it greatly complicates development and debugging of the dynamic compiler.
Profiling techniques based on binary instrumentation record information at every execution instance. They are more costly than statistical sampling, but can also provide more fine-grained frequency information. Like statistical sampling, branch profiling techniques suffer the same problem of not adequately addressing branch correlations. Path-profiling techniques overcome the correlation problem by directly determining hot traces in the program [6]. The program binary is instrumented to collect entire path (i.e., trace) frequency information at runtime in an efficient manner.
A dynamic compiler could adopt these techniques by inserting instrumentation in first-level code fragments to build larger composite secondary fragments. The drawback of adapting offline techniques is the large amount of profile information that is collected and the overhead required to process it. Existing dynamic compilation systems have employed more efficient, but also more approximate, profiling schemes that collect a small amount of profiling information, either during interpretation [5] or by instrumenting first-level fragments [19]. Ephemeral instrumentation is a hybrid profiling technique [37] based on the ability to efficiently enable and disable instrumentation code.
10.3.1.3 Online Profiling in the Dynamo System
As an example of a profiling scheme used in a dynamic compiler, we consider the next executing tail (NET) scheme used in the Dynamo system [16]. The objective of the NET scheme is to significantly reduce profiling overhead while still providing effective hot path predictions. A path is divided into a path head (i.e., the path starting point) and a path tail, which is the remainder of the path following the starting point. For example, in path ABCDE in Figure 10.4a, block A is the path head and BCDE is the path tail. The NET scheme reduces profiling cost by using speculation to predict path tails, while maintaining full profiling support to predict hot path heads. The rationale behind this scheme is that a hot path head indicates that the program is currently executing in a hot region, and the next executing path tail is likely to be part of that region.
Accordingly, execution counts are maintained only for potential path heads, which are the targets of backward taken branches or the targets of cache exiting branches. For example, in Figure 10.4a, one profiling count is maintained for the entire loop at the single path head at the start of block A. Once the counter at block A has exceeded a certain threshold, the next executing path is selected as the hot path for the loop.
10.3.2 Fragment Optimization
After a fragment has been selected, it is translated into a self-contained location-independent intermediate representation (IR). The IR of a fragment serves as a temporary vehicle to transform the original instruction stream into an optimized form and to prepare it for placement and layout in the compiled code cache. To enable fast translation between the binary code and the IR, the abstraction level of the IR is kept close to the binary instruction level. Abstraction is introduced only when needed, such as to provide location independence through symbolic labels and to facilitate code motion and code transformations through the use of virtual registers.
After the fragment is translated into its intermediate form, it can be passed to the optimizer. A dynamic optimizer is not intended to duplicate or replace conventional static compiler optimization. On the contrary, a dynamic optimizer can complement a static compiler by exploiting optimization opportunities that present themselves only at runtime, such as value-based optimization or optimization across the boundaries of dynamically linked libraries. The dynamic optimizer can also apply path-specific optimization that would be too expensive to apply indiscriminately over all paths during static compilation. On a given path, any number of standard compiler optimizations may be performed, such as constant and copy propagation, dead code elimination, value numbering, and redundancy elimination [4, 15]. However, unlike in static compiler optimization, the optimization algorithm must be optimized for efficiency instead of generality and power. A traditional static optimizer performs an initial analysis phase over the code to collect all necessary data flow information that is followed by the actual optimization phase. The cost of performing multiple passes over the code is likely to be prohibitive in a runtime setting. Thus, a dynamic optimizer typically combines analysis and optimization into a single pass over the code [4]. During the combined pass all necessary data flow information is gathered on demand and discarded immediately if it is no longer relevant for current optimization [17].
10.3.2.1 Control Specialization
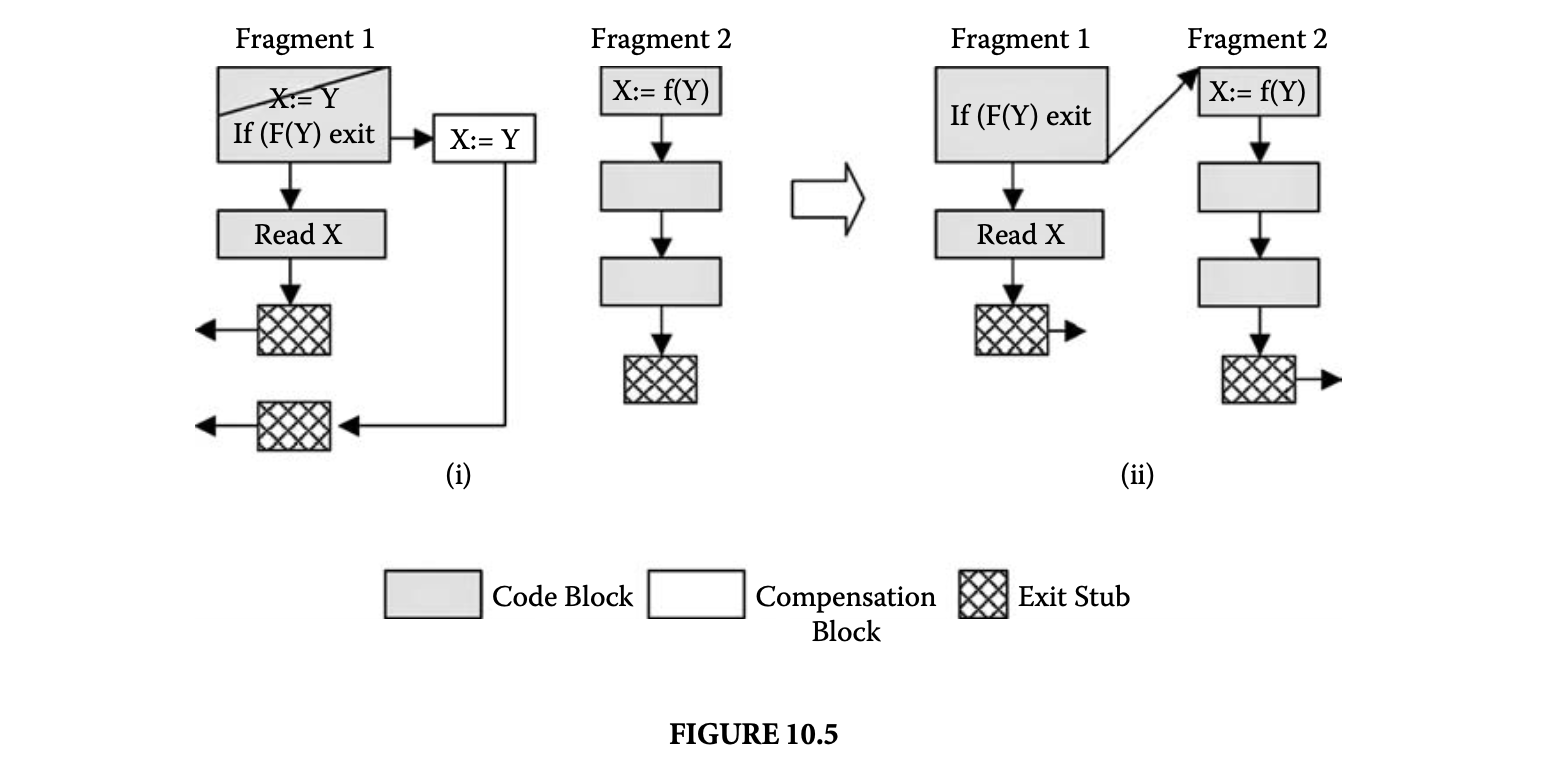
The dynamic compiler implicitly performs a form of control specialization of the code by producing a new layout of the running program inside the compiled code cache. Control specialization describes optimizations whose benefits are based on the execution taking specific control paths. Another example of control specialization is code sinking [4], also referred to as hot-cold optimization [13]. The objective of code sinking is to move instructions from the main fragment execution path into fragment exits to reduce the number of instructions executed on the path. An instruction can be sunk into a fragment exit block if it is not live within the fragment. Although an instruction appears dead on the fragment, it cannot be removed entirely because it is not known whether it is also dead after exiting the fragment.
An example of code sinking is illustrated in Figure 10.5. The assignment X: = Y in the first block in fragment 1 is not live within fragment 1 because it is overwritten by the read instruction in the next block. To avoid useless execution of the assignment when control remains within fragment 1, the assignment can be moved out of the fragment and into a so-called compensation block at every fragment exit at which the assigned variable may still be live, as shown in Figure 10.5. Once the exit block is linked to a target fragment (fragment 2 in Figure 10.5) the code inside the target fragment can be inspected to determine whether the moved assignment becomes dead after linking. If it does, the moved assignment in the compensation block can safely be removed, as shown in Figure 10.5.
Another optimization is prefetching, which involves the placement of prefetch instructions along execution paths prior to the actual usage of the respective data to improve the memory behavior of the dynamically compiled code. If the dynamic compiler can monitor data cache latency, it can easily identify candidates for prefetching. A suitable placement of the corresponding prefetch instructions can be determined by consulting collected profile information.
10.3.2.2 Value Specialization
Value specialization refers to an optimization that customizes the code according to specific runtime values of selected specialization variables. The specialization of a code fragment proceeds like a general form of constant propagation and attempts to simplify the code as much as possible.
Unless it can be established for certain that the specialization variable is always constant, the execution of the specialized code must be guarded by a runtime test. To handle specialization variables that take on multiple values at runtime, the same region of code may be specialized multiple times. Several techniques, such as polymorphic in-line caches [25], have been developed to efficiently select among multiple specialization versions at runtime.
A number of runtime techniques have been developed that automatically specialize code at runtime, given a specification of the specialization variables [9, 23, 31]. In code generated from object-oriented languages, virtual method calls can be specialized for a common receiver class [25]. In principle, any code region can be specialized with respect to any number of values. For example, traces may be specialized according to the entry values of certain registers. In the most extreme case, one can specialize individual instructions, such as complex floating point instructions, with respect to selected fixed-input register values [34].
The major challenge in value specialization is to decide when and what to specialize. Overspecialization of the code can quickly result in code explosion and may severely degrade performance. In techniques that specialize entire functions, the programmer typically indicates the functions to specialize through code annotations prior to execution [9, 23]. Once the specialization regions are determined, the dynamic specializer monitors the respective register values at runtime to trigger the specialization. Runtime specialization is the primary optimization technique employed by nontransparent dynamic compilation systems. We revisit runtime specialization in the context of nontransparent dynamic compilation in Section 10.6.
10.3.2.3 Binary Optimization
The tasks of code optimization and transformation are complicated by having to operate on executable binary code instead of a higher-level intermediate format. The input code to the dynamic optimizer has previously been exposed to register allocation and possibly also to static optimization. Valuable semantic information that is usually incorporated into compilation and optimization, such as type information and information about high-level constructs (i.e., data structures), is no longer available and is generally difficult to reconstruct.
An example of an optimization that is relatively easy to perform on intermediate code but difficult on the binary level is procedure inlining. To completely inline a procedure body, the dynamic compiler has toreverse engineer the implemented calling convention and stack frame layout. Doing this may be difficult, if not impossible, in the presence of memory references that cannot be disambiguated from stack frame references. Thus, the dynamic optimizer may not be able to recognize and entirely eliminate instructions for stack frame allocation and deallocation or instructions that implement caller and callee register saves and restores.
The limitations that result from operating on binary code can be partially lifted by making certain assumptions about compiler conventions. For example, assumptions about certain calling or register usage conventions help in the procedure inlining problem. Also, if it can be assumed that the stack is only accessed via a dedicated stack pointer register, stack references can be disambiguated from other memory references. Enhanced memory disambiguation may then in turn enable more aggressive optimization.
10.3.3 Fragment Linking
Fragment linking is the mechanism by which control is transferred among fragments without exiting the compiled code cache. An important performance benefit of linking is the elimination of unnecessary context switches that are needed to exit and reenter the code cache.
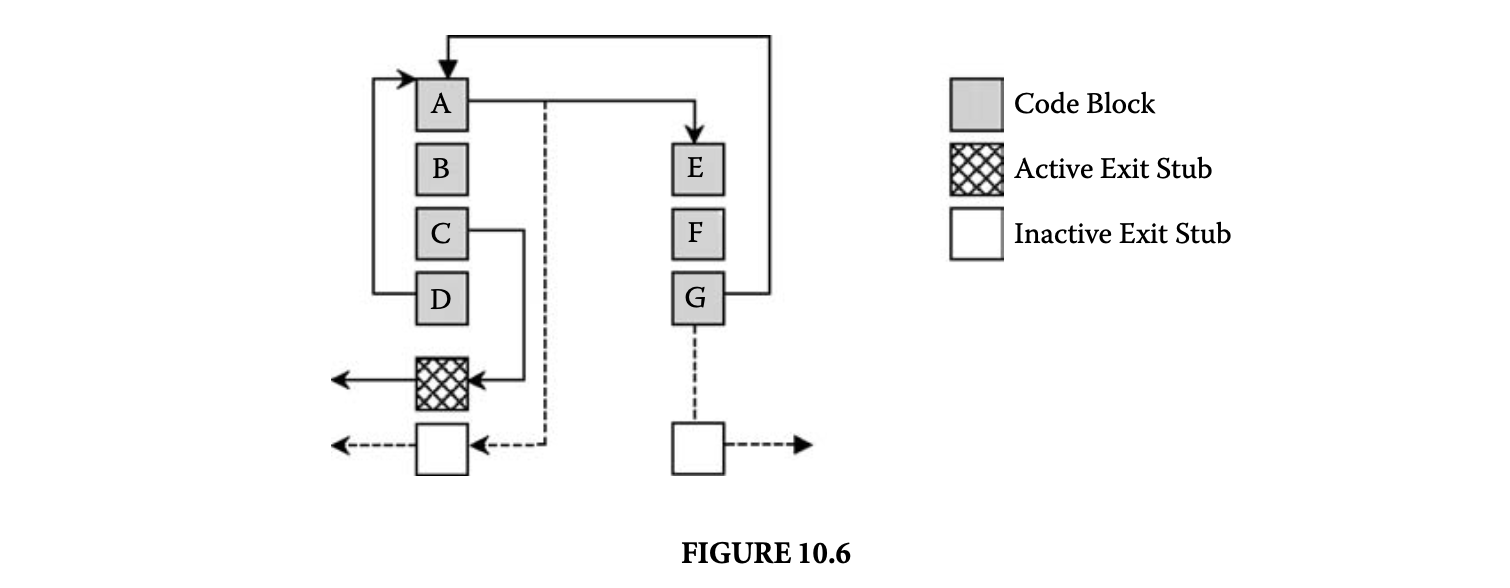
The fragment-linking mechanism may be implemented via exit stubs that are initially inserted at every fragment exiting branch, as illustrated in Figure 10.6. Prior to linking, the exit stubs direct control to the context switch routine to transfer control back to the dynamic compilation engine. If a target fragment for the original exit branch already exists in the code cache, the dynamic compiler can patch the exiting branch to jump directly to its target inside the cache. For example, in Figure 10.6, the branches A to E and G to A have been directly linked, leaving their original exit stubs inactive. To patch exiting branches, some information about the branch must be communicated to the dynamic compiler. For example, to determine the target fragment of a link, the dynamic compiler must know the original target address of the exiting branch. This kind of branch information may be stored in a link record data structure, and a pointer to it can be embedded in the exit stub associated with the branch [4].
The linking of an indirect computed branch is more complicated. If the fragment selector has collected a preferred target for the indirect branch, it can be inlined directly into the fragment code. The indirect target is inlined by converting the indirect branch into a conditional branch that tests whether the current target is equal to the preferred target. If the test succeeds, control falls through to the preferred target inside the fragment. Otherwise, control can be directed to a special lookup routine that is permanently resident in the compiled code cache. This routine implements a lookup to determine whether a fragment for the indirect branch target is currently resident in the cache. If so, control can be directed to the target fragment without having to exit the code cache [4].
 Although its advantages are obvious, linking also has some disadvantages that need to be kept in balance when designing the linker. For example, linking complicates the effective management of the code cache,which may require the periodic removal or relocation of individual fragments. The removal of a fragment may be necessary to make room for new fragments, and fragment relocation may be needed to periodically defragment the code cache. Linking complicates both the removal and relocation of individual fragments because all incoming fragment links have to be unlinked first. Another problem with linking is that it makes it more difficult to limit the latency of asynchronous exception handling. Asynchronous exceptions arise from events such as keyboard interrupts and timer expiration. Exception handling is discussed in more detail in Section 10.3.5.
Although its advantages are obvious, linking also has some disadvantages that need to be kept in balance when designing the linker. For example, linking complicates the effective management of the code cache,which may require the periodic removal or relocation of individual fragments. The removal of a fragment may be necessary to make room for new fragments, and fragment relocation may be needed to periodically defragment the code cache. Linking complicates both the removal and relocation of individual fragments because all incoming fragment links have to be unlinked first. Another problem with linking is that it makes it more difficult to limit the latency of asynchronous exception handling. Asynchronous exceptions arise from events such as keyboard interrupts and timer expiration. Exception handling is discussed in more detail in Section 10.3.5.
Linking may be performed on either a demand basis or a preemptive basis. With on-demand linking, fragments are initially placed in the cache with all their exiting branches targeting an exit stub. Individual links are inserted as needed each time control exits the compiled code cache via an exit stub. With preemptive linking, all possible links are established when a fragment is first placed in the code cache. Preemptive linking may result in unnecessary work when links are introduced that are never executed. On the other hand, demand-based linking causes additional context switches and interruptions of cache execution each time a delayed link is established.
10.3.4 Code Cache Management
The code cache holds the dynamically compiled code and may be organized as one large contiguous area of memory, or it may be divided into a set of smaller partitions. Managing the cache space is a crucial task in the dynamic compilation system. Space consumption is primarily controlled by a cache allocation and deallocation strategy. However, it can also be influenced by the fragment selection strategy. Cache space requirements increase with the amount of code duplication among the fragments. In the most conservative case, the dynamic compiler selects only basic block fragments, which avoids code duplication altogether. However, the code quality and layout in the cache is likely to be unimproved over the original binary. A dynamic compiler may use an adaptive strategy that permits unlimited duplication if sufficient space is available but moves toward shorter, more conservatively selected fragments as the available space in the cache diminishes. Even with an adaptive strategy, the cache may eventually run out of space, and the deallocation of code fragments may be necessary to make room for future fragments.
10.3.4.1 Fragment Deallocation
A fragment deallocation strategy is characterized by three parameters: the granularity, the timing, and the replacement policy that triggers deallocation. The granularity of fragment deallocation may range from an individual fragment deallocation to an entire cache flush. Various performance tradeoffs are to be considered in choosing the deallocation granularity. Individual fragment deallocation is costly in the presence of linking because each fragment exit and entry has to be individually unlinked. To reduce the frequency of cache management events, one might choose to deallocate a group of fragments at a time. A complete flush of one of the cache partitions is considerably cheaper because individual exit and entry links do not have to be processed. Moreover, complete flushing does not incur fragmentation problems. However, uncontrolled flushing may result in loss of useful code fragments that may be costly to reacquire.
The timing of a deallocation can be demand or preemptive based. A demand-based deallocation occurs simply in reaction to an out-of-space condition of the cache space. A preemptive strategy is used in the Dynamo system for cache flushing [4]. The idea is to time a cache flush so that the likelihood of losing valuable cache contents is minimized. The Dynamo system triggers a cache flush when it detects a phase change in the program behavior. When a new program phase is entered, a new working set of fragments is built, and it is likely that most of the previously active code fragments are no longer relevant. Dynamo predicts phase changes by monitoring the fragment creation rate. A phase change is signaled if a sudden increase in the creation rate is detected.
Finally, the cache manager has to implement a replacement policy. A replacement policy is particularly important if individual fragments are deallocated. However, even if an entire cache partition is flushed, a decision has to be made as to which partition to free. The cache manager can borrow simple common replacement policies from memory paging systems, such as first-in, first-out (FIFO) or least recently used (LRU). Alternatively, more advanced garbage collection strategies, such as generational garbage collection strategies, can be adopted to manage the dynamic compilation cache.
Besides space allocation and deallocation, an important code cache service is the fast lookup of fragments that are currently resident in the code cache. Fragment lookups are needed throughout the dynamic compilation system and even during the execution of cached code fragments when it is necessary to look up an indirect branch target. Thus, fast implementation of fragment lookups, for example, via hash tables, is crucial.
10.3.4.2 Multiple Threads
The presence of multithreading can greatly complicate the cache manager. Most of the complication from multithreading can simply be avoided by using thread-private caches. With thread-private caches, each thread uses its own compiled code cache, and no dynamically compiled code is shared among threads. However, the lack of code sharing with thread-private caches has several disadvantages. The total code cache size requirements are increased by the need to replicate thread-shared code in each private cache. Besides additional space requirements, the lack of code sharing can also cause redundant work to be carried out when the same thread-shared code is repeatedly compiled.
To implement shared code caches, every code cache access that deletes or adds fragment code must be synchronized. Operating systems usually provide support for thread synchronization. To what extent threads actually share code and, correspondingly, to what extent shared code caches are beneficial are highly dependent on the application behavior.
Another requirement for handling multiple threads is the provision of thread-private state. Storage for thread-private state is needed for various tasks in the dynamic compiler. For example, during fragment selection a buffer is needed to hold the currently collected fragment code. This buffer must be thread private to avoid corrupting the fragment because multiple threads may be simultaneously in the process of creating fragments.
10.3.5 Handling Exceptions
The occurrence of exceptions while executing in the compiled code cache creates a difficult issue for a dynamic compiler. This is true for both user-level exceptions, such as those defined in the Java language, and system-level exceptions, such as memory faults. An exception has to be serviced as if the original program is executing natively. To ensure proper exception handling, the dynamic compiler has to intercept all exceptions delivered to the program. Otherwise, the appropriate exception handler may be directly invoked, and the dynamic compiler may lose control over the program. Losing control implies that the program has escaped and can run natively for the remainder of the execution.
The original program may have installed an exception handler that examines or even modifies the execution state passed to it. In binary dynamic compilation, the execution state includes the contents of machine registers and the program counter. In JIT compilation, the execution state depends on the underlying virtual machine. For example, in Java, the execution state includes the contents of the Java runtime stack.
If an exception is raised when control is inside the compiled code cache, the execution state may not correspond to any valid state in the original program. The exception handler may fail or operate inadequately when an execution state has been passed to it that was in some way modified through dynamic compilation. The situation is further complicated if the dynamic compiler has performed optimizations on the dynamically compiled code.
Exceptions can be classified as asynchronous or synchronous. Synchronous exceptions are associated with a specific faulting instruction and must be handled immediately before execution can proceed. Examples of synchronous exceptions are memory or hardware faults. Asynchronous exceptions do not require immediate handling, and their processing can be delayed. Examples of asynchronous exceptions include external interrupts (e.g., keyboard interrupts) and timer expiration.
A dynamic compiler can deal with asynchronous exceptions by delaying their handling until a safe execution point is reached. A safe point describes a state at which the precise execution state of the original program is known. In the absence of dynamic code optimization, a safe point is usually reached when control is inside the dynamic compilation engine. When control exits the code cache, the original execution state is saved by the context switch routine prior to reentering the dynamic compilation engine. Thus, the saved context state can be restored before executing the exception handler.
If control resides inside the code cache at the time of the exception, the dynamic compiler can delay handling the exception until the next code cache exit. Because the handling of the exception must not be delayed indefinitely, the dynamic compiler may have to force a code cache exit. To force a cache exit, the fragment that has control at the time of the exception is identified, and all its exit branches are unlinked. Unlinking the exit branches prevents control from spinning within the code cache for an arbitrarily long period of time before the dynamic compiler can process the pending exception.
10.3.5.1 Deoptimization
Unfortunately, postponing the handling of an exception until a safe point is reached is not an option for synchronous exceptions. Synchronous exceptions must be handled immediately, even if control is at a point in the compiled code cache. The original execution state must be recovered as if the original program had executed unmodified. Thus, at the very least, the program counter address, currently a cache address, has to be set to its corresponding address in the original code image.
The situation is more complicated if the dynamic compiler has applied optimizations that change the execution state. This includes optimizations that eliminate code, remap registers, or reorder instructions. In Java JIT compilation, this also includes the promotion of Java stack locations to machine registers. To reestablish the original execution state, the fragment code has to be deoptimized. This problem of deoptimization is similar to one that arises with debugging optimized code, where the original unoptimized user state has to be presented to the programmer when a break point is reached.
Deoptimization techniques for runtime compilation have previously been discussed for JIT compilation [26] and binary translation [24]. Each optimization requires its own deoptimization strategy, and not all optimizations are deoptimizable. For example, the reordering of two memory load operations cannot be undone once the reordered earlier load has executed and raised an exception. To deoptimize a transformation, such as dead code elimination, several approaches can be followed. The dynamic compiler can store sufficient information at every optimization point in the dynamically compiled code. When an exception arises, the stored information is consulted to determine the compensation code that is needed to undo the optimization and reproduce the original execution state. For dead code elimination, the compensation code may be as simple as executing the eliminated instruction. Although this approach enables fast state recovery at exception time, it can require substantial storage for deoptimization information.
An alternative approach, which is better suited if exceptions are rare events, is to retrieve the necessary deoptimization information by recompiling the fragment at exception time. During the initial dynamic compilation of a fragment, no deoptimization information is stored. This information is recorded only during a recompilation that takes place in response to an exception.
It may not always be feasible to determine and store appropriate deoptimization information, for example, for optimizations that exploit specific register values. To be exception-safe and to faithfully reproduce original program behavior, a dynamic compiler may have to suppress optimizations that cannot be deoptimized if an exception were to arise.
10.3.6 Challenges
The previous sections have discussed some of the challenges in designing a dynamic optimization system. A number of other difficult issues still must be dealt with in specific scenarios.
10.3.6.1 Self-Modifying and Self-Referential Code
One such issue is the presence of self-modifying or self-referential code. For example, self-referential code may be inserted for a program to compute a check sum on its binary image. To ensure that self-referential behavior is preserved, the loaded program image should remain untouched, which is the case if the dynamic compiler follows the design illustrated in Figure 10.3.
Self-modifying code is more difficult to handle properly. The major difficulty lies in the detection of code modification. Once code modification has been detected, the proper reaction is to invalidate all fragments currently resident in the cache that contain copies of the modified code. Architectural support can make the detection of self-modifying code easy. If the underlying machine architecture provides page-write protection, the pages that hold the loaded program image can simply be write protected. A page protection violation can then indicate the occurrence of code modification and can trigger the corresponding fragment invalidations in the compiled code cache. Without such architectural support, every store to memory must be intercepted to test for self-modifying stores.
10.3.6.2 Transparency
A truly transparent dynamic compilation system can handle any loaded executable. Thus, to qualify as transparent a dynamic compiler must not assume special preparation of the binary, such as explicit relinking or recompilation with dynamic compilation code. To operate fully transparently, a dynamic compiler should be able to handle even legacy code. In a more restrictive setting, a dynamic compiler may be allowed to make certain assumptions about the loaded code. For example, an assumption may be made that the loaded program was generated by a compiler that obeys certain software conventions. Another assumption could be that it is equipped with symbol table information or stack unwinding information, each of which may provide additional insights into the code that can be valuable during optimization.
10.3.6.3 Reliability
Reliability and robustness present another set of challenges. If the dynamic compiler acts as an optional transparent runtime stage, robust operation is of even greater importance than in static compilation stages. Ideally, the dynamic compilation system should reach hardware levels of robustness, though it is not clear how this can be achieved with a piece of software.
10.3.6.4 Real-Time Constraints
Handling real-time constraints in a dynamic compiler has not been sufficiently studied. The execution speed of a program that runs under the control of a dynamic compiler may experience large variations. Initially, when the code cache is nearly empty, dynamic compilation overhead is high and execution progress is correspondingly slow. Over time, as a program working set materializes in the code cache, the dynamic compilation overhead diminishes and execution speed picks up. In general, performance progress is highly unpredictable because it depends on the code reuse rate of the program. Thus, it is not clear how any kind of real-time guarantees can be provided if the program is dynamically compiled.
10.4 Dynamic Binary Translation
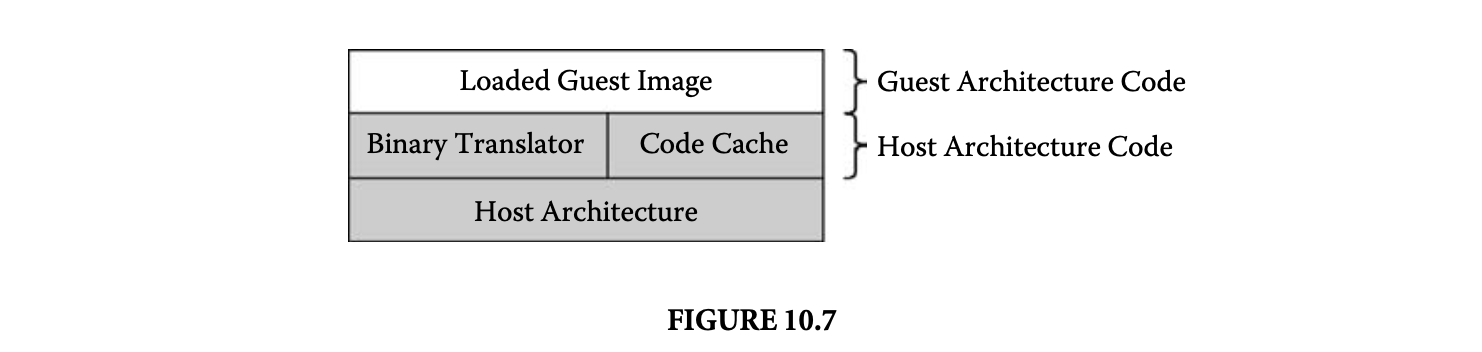
The previous sections have described dynamic compilation in the context of code transformation for performance optimization. Another motivation for employing a dynamic compiler is software migration. In this case, the loaded image is native to a guest architecture that is different from the host architecture, which runs the dynamic compiler. The binary translation model of dynamic compilation is illustrated in Figure 10.7. Caching instruction set simulators [8] and dynamic binary translation systems [19, 35, 39] are examples of systems that use dynamic compilation to translate nonnative guest code to a native host architecture.
An interesting aspect of dynamic binary translation is achieving separation of the running software from the underlying hardware. In principle, a dynamic compiler can provide a software implementationof an arbitrary guest architecture. With the dynamic compilation layer acting as a bridge, software and hardware may evolve independently. Architectural advances can be hidden and remain transparent to the user. This potential of dynamic binary translation has recently been commercially exploited by Transmeta's code morphing software [14] and Transitive's emulation software layer [38].
The high-level design of a dynamic compiler, if used for binary translation, remains the same as illustrated in Figure 10.3, with the addition of a translation module. This additional module translates fragments selected from guest architecture code into fragments for the host architecture, as illustrated in Figure 10.8.
To produce a translation from one native code format to another, the dynamic compiler may choose to first translate the guest architecture code into an intermediate format and then generate the final host architecture instructions. Going through an intermediate format is especially helpful if the differences in host and guest architecture are large. To facilitate the translation of instructions, it is useful to establish a fixed mapping between guest and host architecture resources, such as machine registers [19].
Although the functionality of the major components in the dynamic compilation stage, such as fragment selection and code cache management, is similar to the case of native dynamic optimization, a number of important challenges are unique to binary translation.
If the binary translation system translates code not only across different architectures but also across different operating systems, it is called full system translation. The Daisy binary translation system that translates from code for the PowerPC under IBM's UNIX system, AIX, to a customized very long instruction word (VLIW) architecture is an example of full system translation [19]. Full system translation may be further complicated by the presence of a virtual address space in the guest system. The entire virtual memory address translation mechanism has to be faithfully emulated during the translation, which includes the handling of such events as page faults. Furthermore, low-level boot code sequences must also be translated. Building a dynamic compiler for full system translation requires in-depth knowledge of both the guest and host architectures and operating systems.
10.5 Just-in-Time Compilation
JIT compilation refers to the runtime compilation of intermediate virtual machine code. Thus, unlike binary dynamic compilation, the process does not start out with already compiled executable code. JIT compilation was introduced for Smalltalk-80 [18] but has recently been widely popularized with the introduction of the Java programming language and its intermediate bytecode format [22].
The virtual machine environment for a loaded intermediate program is illustrated in Figure 10.9. As in binary dynamic compilation, the virtual machine includes a compilation module and a compiled code cache. Another core component of the virtual machine is the runtime system that provides various system services that are needed for the execution of the code.


The loaded intermediate code image is inherently tied to, and does not execute outside, the virtual machine. Virtual machines are an attractive model to implement a "write-once-run-anywhere" programming paradigm. The program is statically compiled to the virtual machine language. In principle, the same statically compiled program may run on any hardware environment, as long as the environment provides an appropriate virtual machine. During execution in the virtual machine, the program may be further (JIT) compiled to the particular underlying machine architecture. A virtual machine with a JIT compiler may or may not include a virtual machine language interpreter.
JIT compilation and binary dynamic compilation share a number of important characteristics. In both cases, the management of the compiled code cache is crucial. Just like a binary dynamic compiler, the JIT compiler may employ profiling to stage the compilation and optimization effort into several modes, from a quick base compilation mode with no optimization to an aggressively optimized mode.
Some important differences between JIT and binary dynamic compilation are due to the different levels of abstraction in their input. To facilitate execution in the virtual machine, the intermediate code is typically equipped with semantic information, such as symbol tables or constant pools. A JIT compiler can take advantage of the available semantic information. Thus, JIT compilation more closely resembles the process of static compilation than does binary recompilation.
The virtual machine code that the JIT compiler operates on is typically location independent, and information about program components, such as procedures or methods, is available. In contrast, binary dynamic compilers operate on fully linked binary code and usually face a code recovery problem. To recognize control flow, code layout decisions that were made when producing the binary have to be reverse engineered, and full code recovery is in general not possible. Because of the code recovery problem, binary dynamic compilers are more limited in their choice of compilation unit. They typically choose simple code units, such as straight-line code blocks, traces, or tree-shaped regions. JIT compilers, on the other hand, can recognize higher-level code constructs and global control flow. They typically choose whole methods or procedures as the compilation unit, just as a static compiler would do. However, recently it has been recognized that there are other advantages to considering compilation units at a different granularity than whole procedures, such as reduced compiled code sizes [2].
The availability of semantic information in a JIT compiler also allows for a larger optimization repertoire. Except for overhead concerns, a JIT compiler is just as capable of optimizing the code as a static compiler. JIT compilers can even go beyond the capabilities of a static compiler by taking advantage of dynamic information about the code. In contrast, a binary dynamic optimizer is more constrained by the low-level representation and the lack of a global view of the program. The aliasing problem is worse in binary dynamic compilation because the higher-level-type information that may help disambiguate memory references is not available. Furthermore, the lack of a global view of the program forces the binary dynamic compiler to make worst-case assumptions at entry and exit points of the currently processed code fragment, which may preclude otherwise safe optimizations.
 The differences in JIT compilation and binary dynamic compilation are summarized in Table 1. A JIT compiler is clearly more able to produce highly optimized code than a binary compiler. However,consider a scenario where the objective is not code quality but compilation speed. Under these conditions, it is no longer clear that the JIT compiler has an advantage. A number of compilation and code generation decisions, such as register allocation and instruction selection, have already been made in the binary code and can often be reused during dynamic compilation. For example, binary translators typically construct a fixed mapping between guest and host system machine registers. Consider the situation where the guest architecture has fewer registers, for instance, 32, than the host architecture, for instance, 64, so that the 32 guest registers can be mapped to the first 32 host registers. When translating an instruction opcode, op1,op2, the translator can use the fixed mapping to directly translate the operands from guest to host machine registers. In this fashion, the translator can produce code with globally allocated registers without any analysis, simply by reusing register allocation decisions from the guest code.
The differences in JIT compilation and binary dynamic compilation are summarized in Table 1. A JIT compiler is clearly more able to produce highly optimized code than a binary compiler. However,consider a scenario where the objective is not code quality but compilation speed. Under these conditions, it is no longer clear that the JIT compiler has an advantage. A number of compilation and code generation decisions, such as register allocation and instruction selection, have already been made in the binary code and can often be reused during dynamic compilation. For example, binary translators typically construct a fixed mapping between guest and host system machine registers. Consider the situation where the guest architecture has fewer registers, for instance, 32, than the host architecture, for instance, 64, so that the 32 guest registers can be mapped to the first 32 host registers. When translating an instruction opcode, op1,op2, the translator can use the fixed mapping to directly translate the operands from guest to host machine registers. In this fashion, the translator can produce code with globally allocated registers without any analysis, simply by reusing register allocation decisions from the guest code.
In contrast, a JIT compiler that operates on intermediated code has to perform a potentially costly global analysis to achieve the same level of register allocation. Thus, what appears to be a limitation may prove to have its virtues depending on the compilation scenario.
10.6 Nontransparent Approach: Runtime Specialization
A common characteristic among the dynamic compilation systems discussed so far is transparency. The dynamic compiler operates in complete independence from static compilation stages and does not make assumptions about, or require changes to, the static compiler.
A different, nontransparent approach to dynamic compilation has been followed by staged runtime specialization techniques [9, 31, 33]. The objective of these techniques is to prepare for dynamic compilation as much as possible at static compilation time. One type of optimization that has been supported in this fashion is value-specific code specialization. Code specialization is an optimization that produces an optimized version by customizing the code to specific values of selected specialization variables.
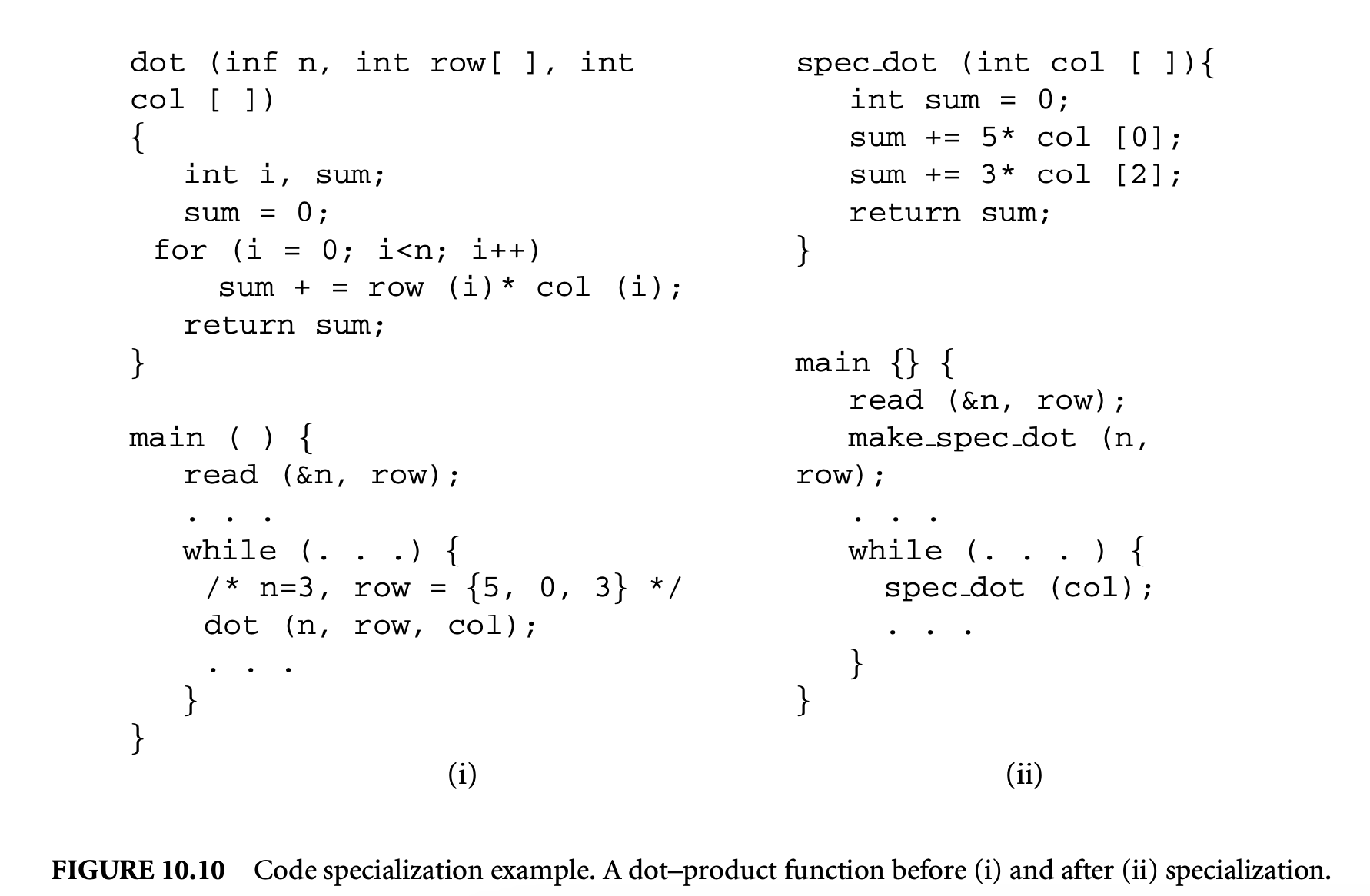
Consider the code example shown in Figure 10.10. Figure 10.5i shows a dot product function that is called from within a loop in the main program, such that two parameters are fixed ( and , , ) and only a third parameter () may still vary. A more efficient implementation can be achieved by specializing the dot function for the two fixed parameters. The resulting function spec doc, which retains only the one varying parameter, is shown in Figure 10.10ii.
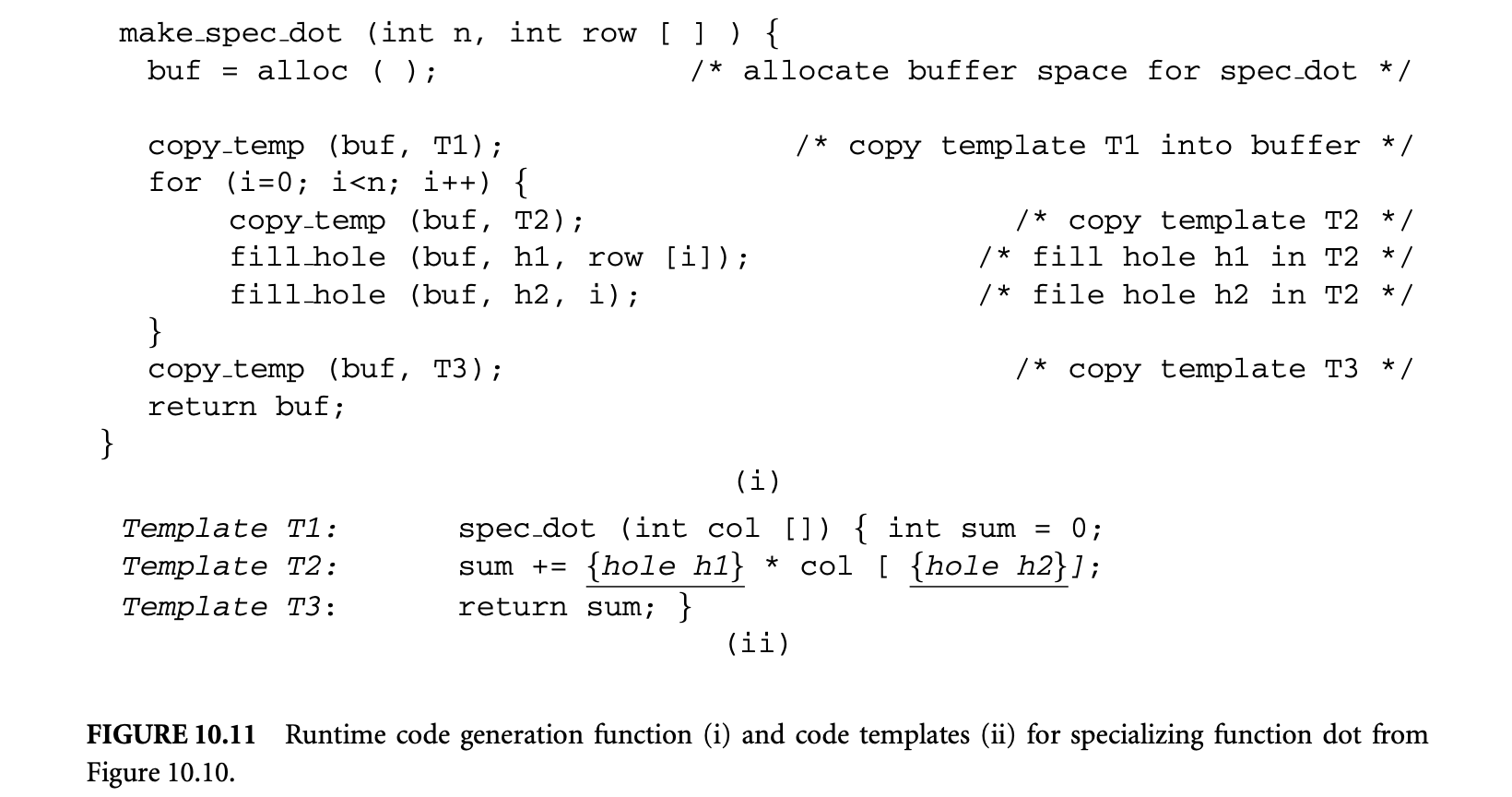
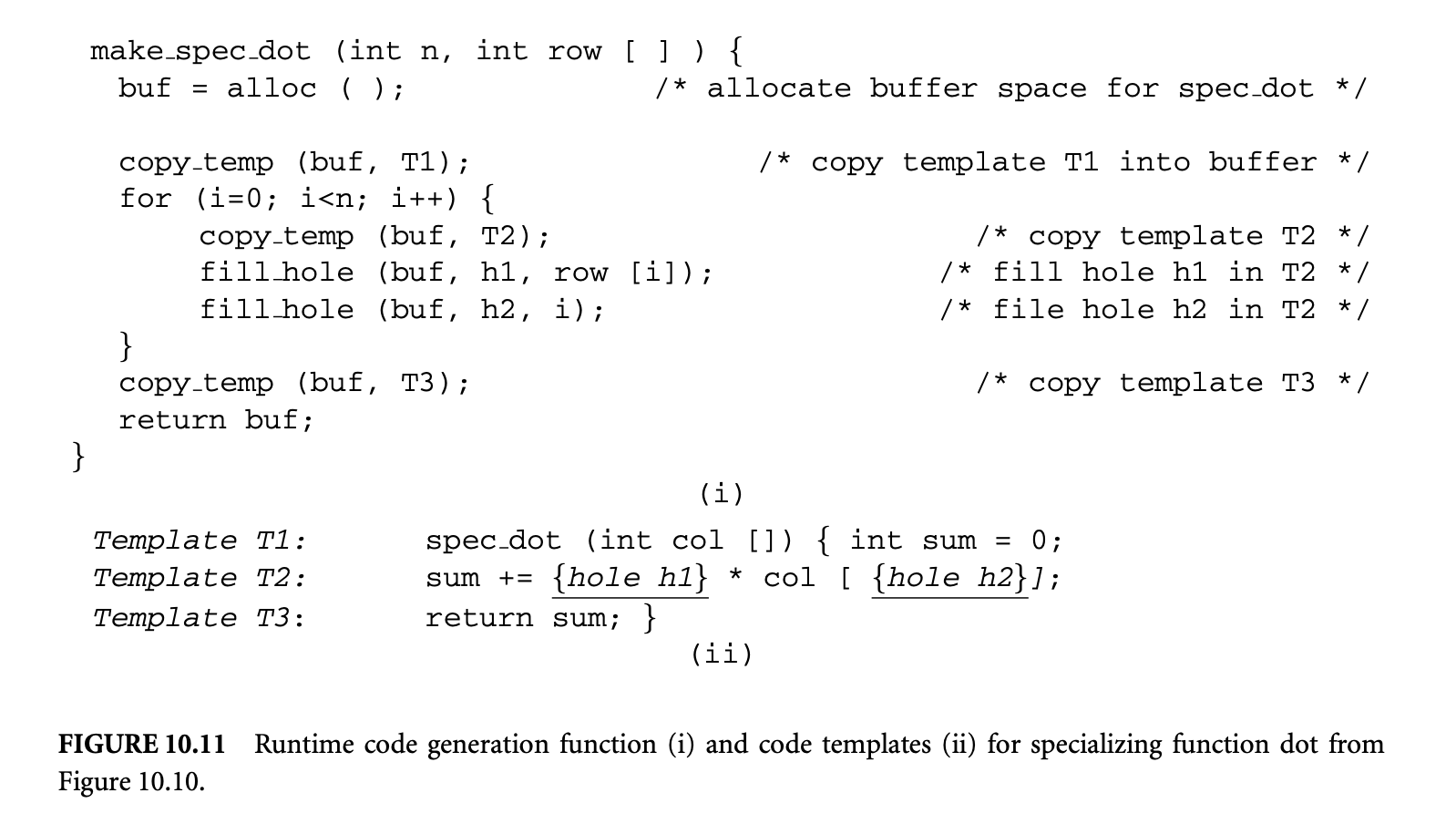
In principle, functions that are specialized at runtime, such as spec dot, could be produced in a JIT compiler. However, code specialization requires extensive analysis and is too costly to be performed fully at runtime. If the functions and the parameters for specialization are fixed at compile time, the static compiler can prepare the runtime specialization and perform all the required code analyses. Based on the analysis results, the compiler constructs code templates for the specialized procedure. The code templates for spec dot are shown in Figure 10.11ii in C notation. The templates may be parameterized with respect to missing runtime values. Parameterized templates contain holes that are filled in at runtime with the respective values. For example, template T2 in Figure 10.11ii contains two holes for the runtime parameters row[0]\ldotsrow[2] (hole h1) and the values (hole h2).
By moving most of the work to static compile time, the runtime overhead is reduced to initialization and linking of the prepared code templates. In the example from Figure 10.10, the program is statically compiled so that in place of the call to routine dot, a call to a specialized dynamic code generation agent is inserted. The specialized code generation agent for the example from Figure 10.10, make spec dot, is shown in Figure 10.11i. When invoked at runtime, the specialized dynamic compiler looks up the appropriate code templates for spec dot,
fills in the holes for parameters and row with their runtime values, and patches the original main routine to link in the new specialized code.
 The required compiler support renders these runtime specialization techniques less flexible than transparent dynamic compilation systems. The kind, scope, and timing of dynamic code generation are fixed at compile time and hardwired into the code. Furthermore, runtime code specialization techniques usually require programmer assistance to choose the specialization regions and variables (e.g., via code annotations or compiler directives). Because overspecialization can easily result in code explosion and performance degradation, the selection of beneficial specialization candidates is likely to follow an interactive approach,
The required compiler support renders these runtime specialization techniques less flexible than transparent dynamic compilation systems. The kind, scope, and timing of dynamic code generation are fixed at compile time and hardwired into the code. Furthermore, runtime code specialization techniques usually require programmer assistance to choose the specialization regions and variables (e.g., via code annotations or compiler directives). Because overspecialization can easily result in code explosion and performance degradation, the selection of beneficial specialization candidates is likely to follow an interactive approach,
 where the programmer explores various specialization opportunities. Recently, a system has been developed toward automating the placement of compiler directives for dynamic code specialization [32].
where the programmer explores various specialization opportunities. Recently, a system has been developed toward automating the placement of compiler directives for dynamic code specialization [32].
The preceding techniques for runtime specialization are classified as declarative. Based on the programmer declaration, templates are produced automatically by the static compiler. An alternative approach is imperative code specialization. In an imperative approach, the programmer explicitly encodes the runtime templates. C is an extension of the C languages that allows the programmer to specify dynamic code templates [33]. The static compiler compiles these programmer specifications into code templates that are initiated at runtime in a similar way to the declarative approach. Imperative runtime specialization is more general because it can support a broader range of runtime code generation techniques. However, it also requires deeper programmer involvement and is more error prone, because of the difficulty of specifying the dynamic code templates.
10.7 Summary
Dynamic compilation is a growing research field fueled by the desire to go beyond the traditional compilation model that views a compiled binary as a static immutable object. The ability to manipulate and transform code at runtime provides the necessary instruments to implement novel execution services. This chapter discussed the mechanisms of dynamic compilation systems in the context of two applications: dynamic performance optimization and transparent software migration. However, the capabilities of dynamic compilation systems can go further and enable such services as dynamic decompression and decryption or the implementation of security policies and safety checks.
Dynamic compilation should not be viewed as a technique that competes with static compilation. Dynamic compilation complements static compilation, and together they make it possible to move toward a truly write-once-run-anywhere paradigm of software implementation.
Although dynamic compilation research has advanced substantially in recent years, numerous challenges remain. Little progress has been made in providing effective development and debugging support for dynamic compilation systems. Developing and debugging a dynamic compilation system is particularly difficult because the source of program bugs may be inside transient dynamically generated code. Break points cannot be placed in code that has not yet materialized, and symbolic debugging of dynamically generated code is not an option. The lack of effective debugging support is one of the reasons the engineering of dynamic compilation systems is such a difficult task. Another area that needs further attention is code validation. Techniques are needed to assess the correctness of dynamically generated code. Unless dynamic compilation systems can guarantee high levels of robustness, they are not likely to achieve widespread adoption.
This chapter surveys and discusses the major approaches to dynamic compilation with a focus on transparent binary dynamic compilation. For more information on the dynamic compilation systems that have been discussed, we encourage the reader to explore the sources cited in the References section.
References
L. Anderson, M. Berc, J. Dean, M. Ghemawat, S. Henzinger, S. Leung, L. Sites, M. Vandervoorde, C. Waldspurger, and W. Weihl. 1977. Continuous profiling: Where have all the cycles gone? In Proceedings of the 16th ACM Symposium of Operating Systems Principles, 14. 2: D. Bruening and E. Duesterwald. 2000. Exploring optimal compilation unit shapes for an embedded just-in-time compiler. In Proceedings of the 3rd Workshop on Feedback-Directed and Dynamic Optimization. 3: D. Bruening, E. Duesterwald, and S. Amarasinghe. 2001. Design and implementation of a dynamic optimization framework for Windows. In Proceedings of the 4th Workshop on Feedback-Directed and Dynamic Optimization. 4: V. Bala, E. Duesterwald, and S. Banerjia. 1999. Transparent dynamic optimization: The design and implementation of Dynamo. Hewlett-Packard Laboratories Technical Report HPL-1999-78.
V. Bala, E. Duesterwald, and S. Banerjia. 2000. Dynamo: A transparent runtime optimization system. In Proceedings of the SIGPLAN '00 Conference on Programming Language Design and Implementation, 1-12. 6: T. Ball and J. Larus. 1996. Efficient path profiling. In Proceedings of the 29th Annual International Symposium on Microarchitecture (MICRO-29), 46-57. 7: W. Chen, S. Lerner, R. Chaiken, and D. Gillies. 2000. Mojo: A dynamic optimization system. In Proceedings of the 3rd Workshop on Feedback-Directed and Dynamic Optimization. 8: R. F. Cmelik and D. Keppel. 1993. Shade: A fast instruction set simulator for execution profiling. Technical Report UWCSE-93-06-06, Department of Computer Science and Engineering, University of Washington, Seattle. 9: C. Consel and F. Noel. 1996. A general approach for run-time specialization and its application to C. In Proceedings of the 23rd Annual Symposium on Principles of Programming Languages, 145-56. 10: T. Conte, B. Patel, K. Menezes, and J. Cox. 1996. Hardware-based profiling: an effective technique for profile-driven optimization. Int. J. Parallel Programming 24:187-206. 11: C. Chambers and D. Ungar. 1989. Customization: Optimizing compiler technology for SELF, a dynamically-typed object-oriented programming language. In Proceedings of the SIGPLAN '89 Conference on Programming Language Design and Implementation, 146-60. 12: Y. C. Chung and Y. Byung-Sun. The Latte Java Virtual Machine. Mass Laboratory, Seoul National University, Korea. latte.snu.ac.kr/manual/html mono/latte.html. 13: R. Cohn and G. Lowney. 1996. Hot cold optimization of large Windows/NT applications. In Proceedings of the 29th Annual International Symposium on Microarchitecture, 80-89. 14: D. Ditzel. 2000. Transmeta's Crusoe: Cool chips for mobile computing. In Proceedings of Hot Chips 12, Stanford University, Stanford, CA. 15: D. Deaver, R. Gorton, and N. Rubin. 1999. Wiggins/Redstone: An online program specializer. In Proceedings of Hot Chips 11, Palo Alto, CA. 16: E. Duesterwald and V. Bala. 2000. Software profiling for hot path prediction: Less is more. In Proceedings of 9th International Conference on Architectural Support for Programming Languages and Operating Systems, 202-211. 17: E. Duesterwald, R. Gupta, and M. L. Soffa. 1995. Demand-driven computation of interprocedural data flow. In Proceedings of the 22nd ACM Symposium on Principles on Programming Languages. 37-48. 18: L. P. Deutsch and A. M. Schiffman. 1994. Efficient implementation of the Smalltalk-80 system. In Conference Record of the 11th Annual ACM Symposium on Principles of Programming Languages, 297-302. 19: K. Ebcioglu and E. Altman. 1997. DAISY: Dynamic compilation for 100% architectural compatibility. In Proceedings of the 24th Annual International Symposium on Computer Architecture, 26-37. 20: D. R. Engler. 1996. VOODE: A retargetable, extensible, very fast dynamic code generation system. In Proceedings of the SIGPLAN '96 Conference on Programming Language Design and Implementation (PLDI '96), 160-70. 21: D. H. Friendly, S. J. Patel, and Y. N. Patt. 1998. Putting the fill unit to work: Dynamic optimizations for trace cache microprocessors. In Proceedings of the 31st Annual International Symposium on Microarchitecture (MICRO-31), 173-81. 22: J. Gosling, B. Joy, and G. Steele. 1999. The Java language specification. Reading, MA: Addison-Wesley. 23: B. Grant, M. Philipose, M. Mock, C. Chambers, and S. Eggers. 1999. An evaluation of staged run-time optimizations in DyC. In Proceedings of the SIGPLAN '99 Conference on Programming Language Design and Implementation, 293-303. 24: M. Gschwind and E. Altman. 2000. Optimization and precise exceptions in dynamic compilation. In Proceedings of Workshop on Binary Translation.
U. Hoelzle, C. Chambers, and D. Ungar. 1991. Optimizing dynamically-typed object-oriented languages with polymorphic inline caches. In Proceedings of ECOOP 4th European Conference on Object-Oriented Programming, 21-38. 26: U. Hoelzle, C. Chambers, and D. Ungar. 1992. Debugging optimized code with dynamic deoptimization. In Proceedings of the SIGPLAN '92 Conference on Programming Language Design and Implementation, 32-43. 27: R. J. Hookway and M. A. Herdeg. 1997. FXl32: Combining emulation and binary translation. Digital Tech. J. 0(1):3-12. 28: IBM Research. The IBM Jalapeno Project. <www.research.ibm.com/jalapeno/>. 29: Intel Microprocessor Research Lab. Open Runtime Platform. <www.intel.com/research/mrl/orp/>. 30: C. Krintz and B. Calder. 2001. Usingannotations to reduce dynamic optimization time. In Proceedings of the SIGPLAN '01 Conference on Programming Language Design and Implementation, 156-67. 31: M. Leone and P. Lee. 1996. Optimizing ML with run-time code generation. In Proceedings of the SIGPLAN '96 Conference on Programming Language Design and Implementation, 137-48. 32: M. Mock, M. Berryman, C. Chambers, and S. Eggers. 1999. Calpa: A tool for automatic dynamic compilation. In Proceedings of the 2nd Workshop on Feedback-Directed and Dynamic Optimization. 33: M. Poletta, D. R. Engler, and M. F. Kaashoek. 1997. TCC: A system for fast flexible, and high-level dynamic code generation. In Proceedings of the SIGPLAN '97 Conference on Programming Language Design and Implementation, 109-21. 34: S. Richardson. 1993. Exploiting trivial and redundant computation. In Proceedings of the 11th Symposium on Computer Arithmetic. 35: K. Scott and J. Davidson. 2001. Strata: A software dynamic translation infrastructure. In Proceedings of the 2001 Workshop on Binary Translation. 36: A. Srivastava, A. Edwards, and H. Vo. 2001. Vulcan: Binary translation in a distributed environment. Technical Report MSR-TR-2001-50, Microsoft Research. 37: O. Taub, S. Schechter, and M. D. Smith. 2000. Ephemeral instrumentation for lightweight program profiling. Technical report, Harvard University. 38: Transitive Technologies. <www.transitives.com/>. 39: D. Ung and C. Cifuentes. 2000. Machine-adaptable dynamic binary translation. ACM Sigplan Notices 35(7):41-51. 40: X. Zhang, Z. Wang, N. Gloy, J. Chen, and M. Smith. 1997. System support for automatic profiling and optimization. In Proceedings of the 16th ACM Symposium on Operating Systems Principles, 15-26.